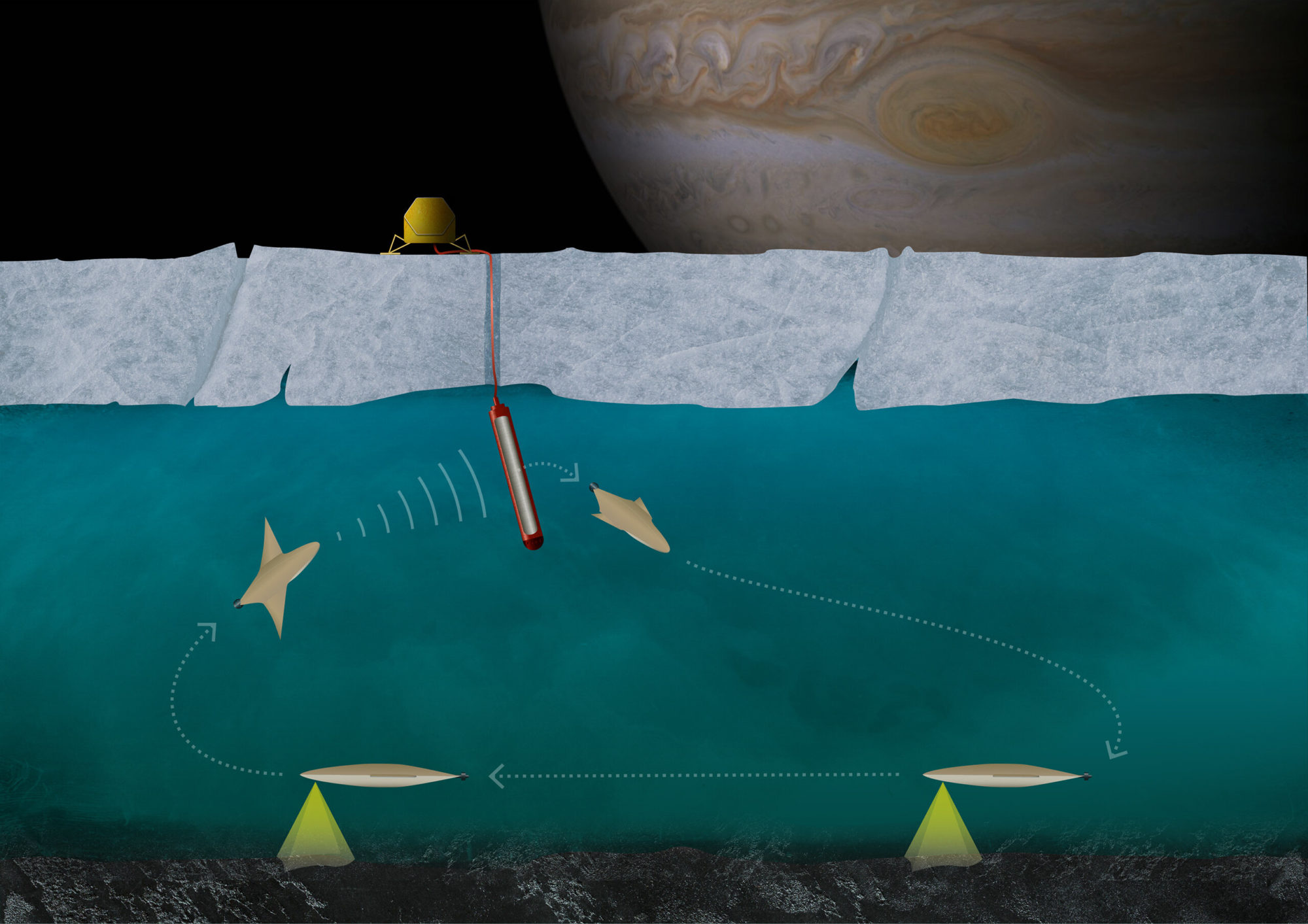
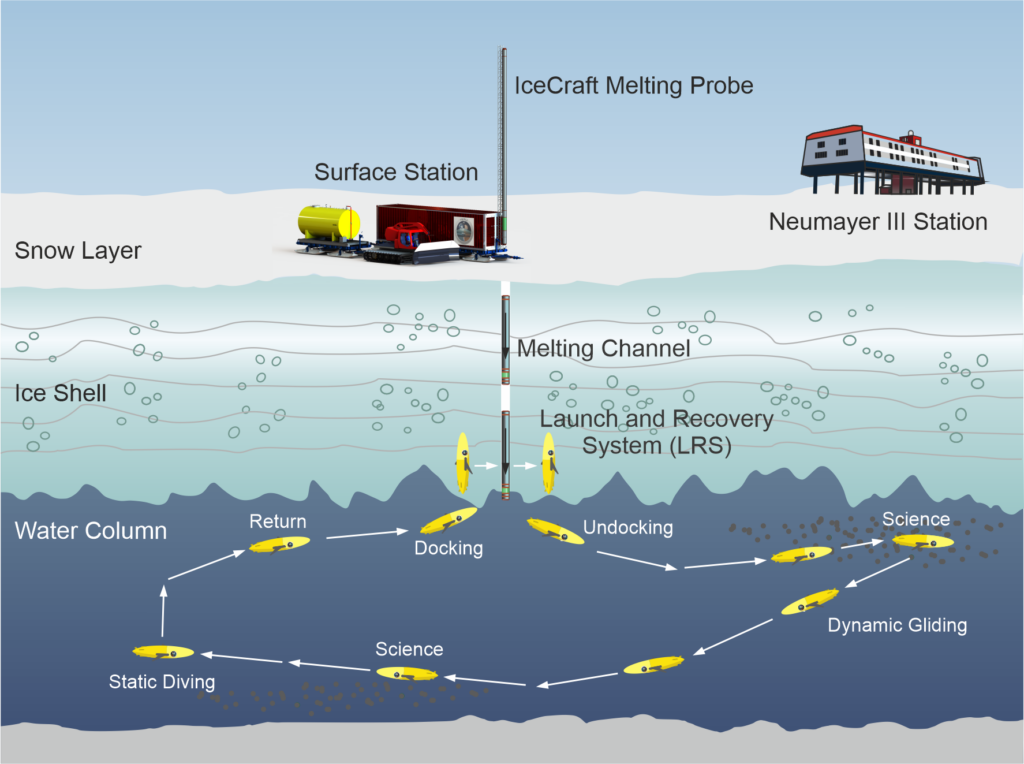
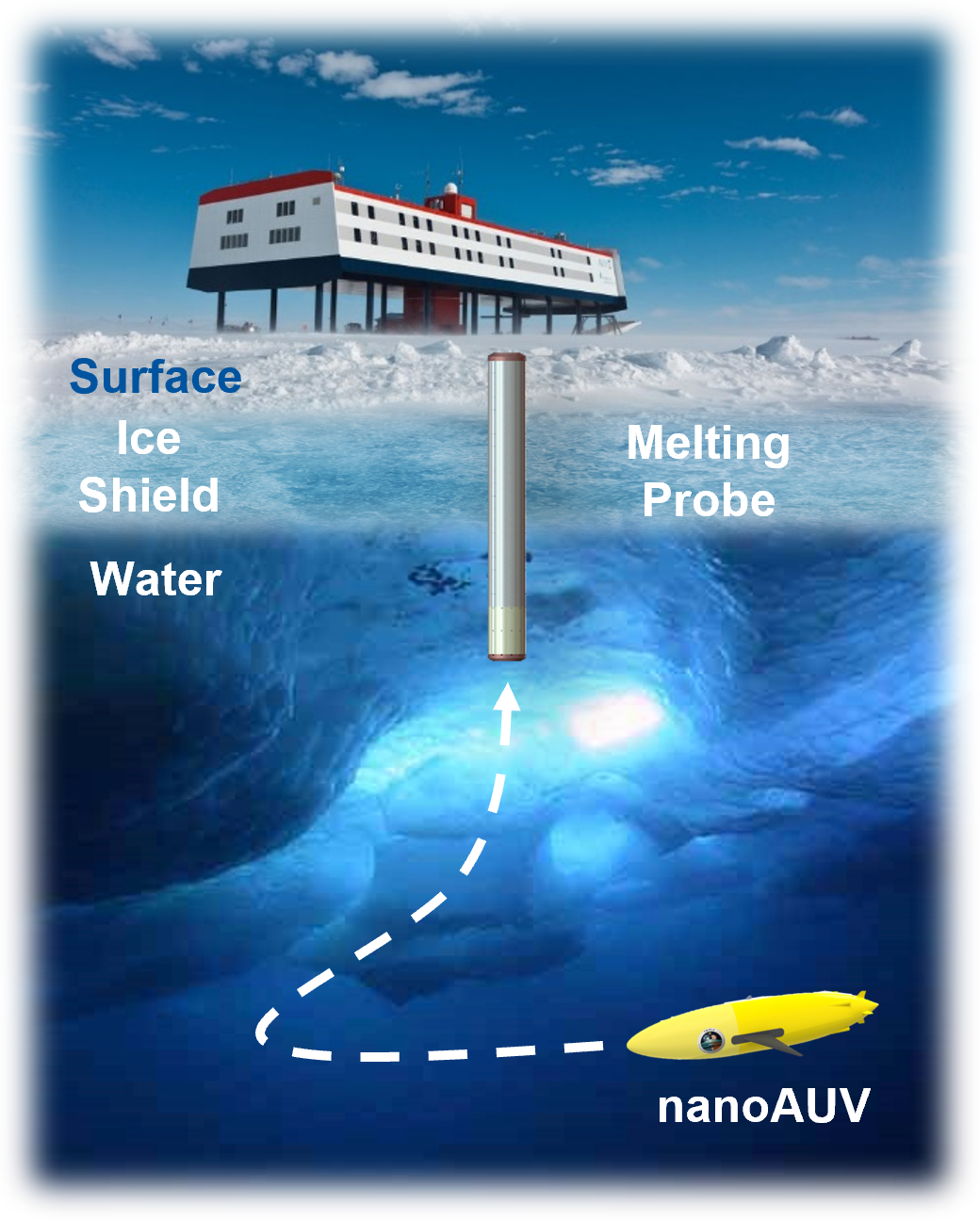
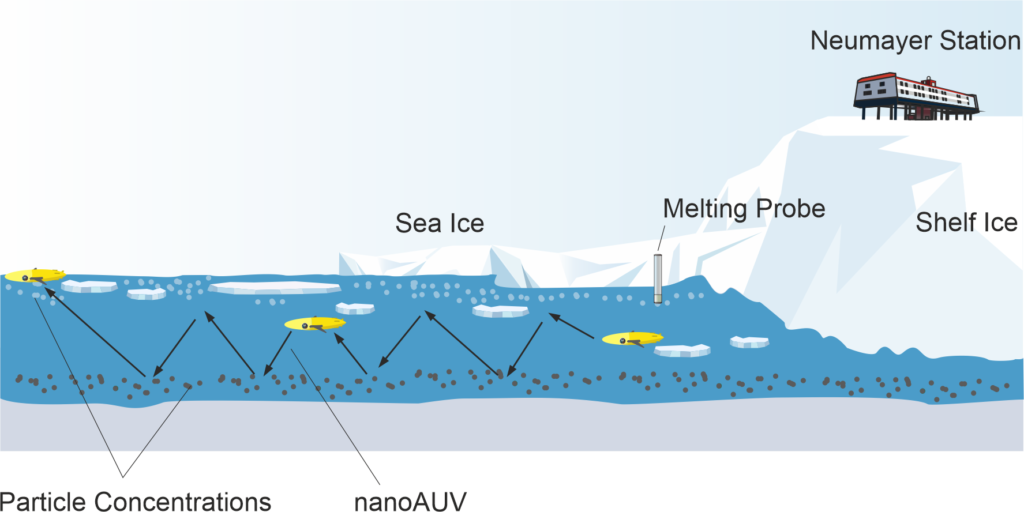
The TRIPLE exploration system consists of three main elements,the IceCraft melting probe, the miniaturized explorationvehicle nanoAUV, and the AstroBioLab (ABL). IceCraft-2, the longer successor of IceCraft-1, should penetrate the ice shell from the Surface Station and anchor itself at the ice-water boundary. The smaller IceCraft-1 melting probe was tested in spring 2023 at Neumayer III Station (Antarctica). The melting probe contains the Launch and Recovery System (LRS) with the nanoAUV as payload. The LRS releases the nanoAUV into the water column using a robotic arm with a soft robotic gripper. The ABL is divided into two components. One is in the melting probe, the other in the nanoAUV. It measures environmental scientific data and analyzes watersamples taken by the nanoAUV. Moreover, the LRS acts as a beacon and communication relay for the nanoAUV during the mission. A Command and Data Handling System (CDHS) is implemented at the site of the Surface Station for monitoring and commanding the TRIPLE system. The complete TRIPLE system is planned to be demonstrated at Neumayer III Station (Antarctica) on the Ekström Ice Shelf in spring 2026. The final TRIPLE system will be demonstrated in Antarctica’s Dome-C region in spring 2029.
TRANSIT Ice
Melting Probe
The Dome-C mission demands a retrievable melting probe to get through a 4 kilometers-thick ice-layer. For the mission it is of great importance for the melting probe to be capable of detecting and avoiding obstacles on its trajectories, anchoring at the ice-water boundary to release and support the nanoAUV.
Among the numerous challenges faced by the melting probe is the necessity for a high melting speed to accomplish the mission within a single Antarctic summer season. Taking the distance of 4 kilometers into account, a minimum speed of 10 m/h is needed. To reach this high speed a high power transmission with as little loss as possible over the large cable length is required. As the most critical component, the cable must also bear the weight of the probe.
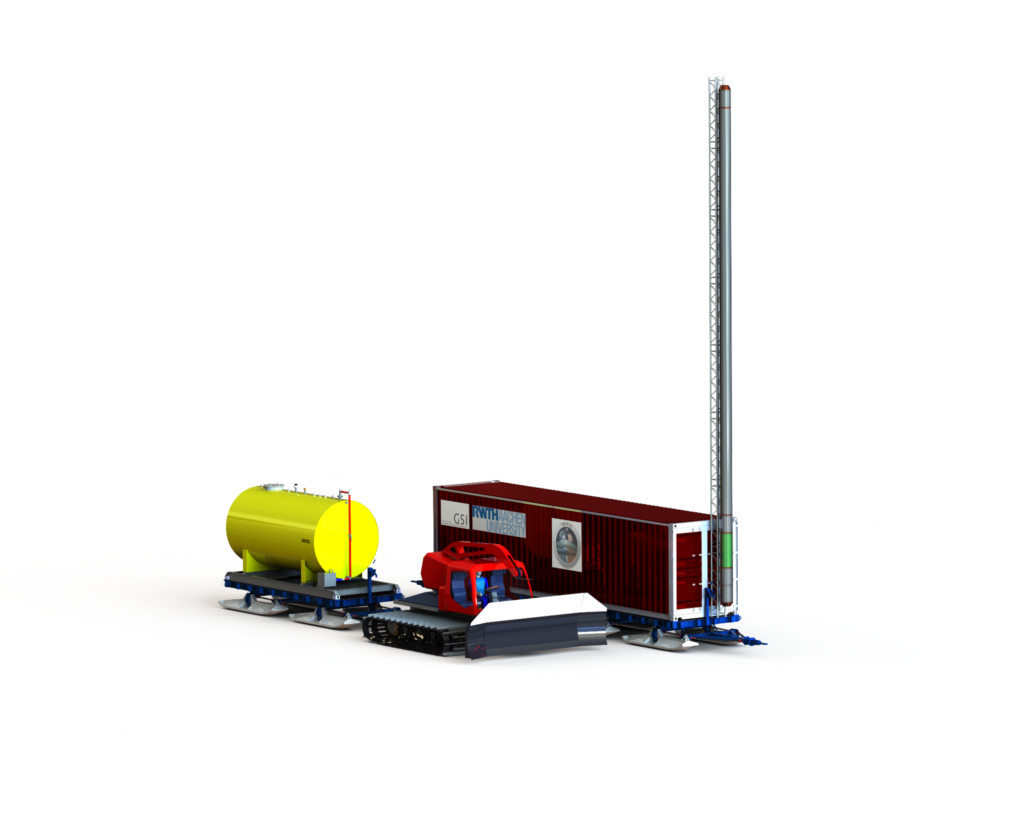
(© GSI GmbH)
In 2014, the very first successful application of a melting probe to collect contamination-free subglacial water samples was demonstrated by the melting probe “Ice-Mole” on the Antarctic Taylor glacier. The Ice-Mole was developed within the Enceladus Explorer (EnEx) project mounted by In 2014, the very first successful application of a melting probe to collect contamination-free subglacial water samples was demonstrated by the melting probe “Ice-Mole” on the Antarctic Taylor glacier. The Ice-Mole was developed within the Enceladus Explorer (EnEx) project mounted by the German Space Agency at DLR. To get to the scientific object of desire, a crevasse in the Taylor glacier, the Ice-Mole had made its way through an ice layer of about 16 m with a melting speed of one meter per hour [2].
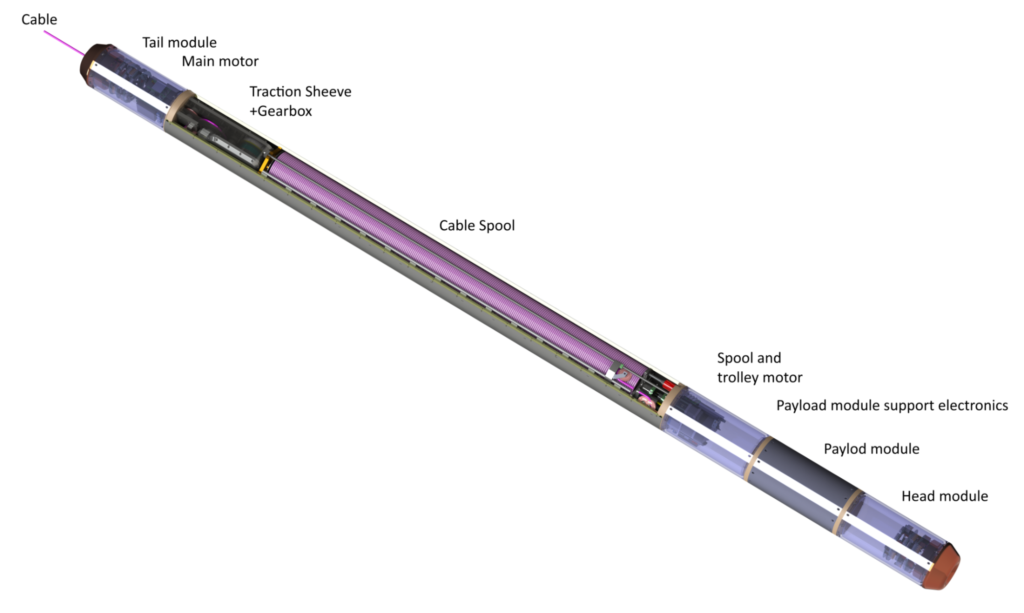
(© GSI GmbH)
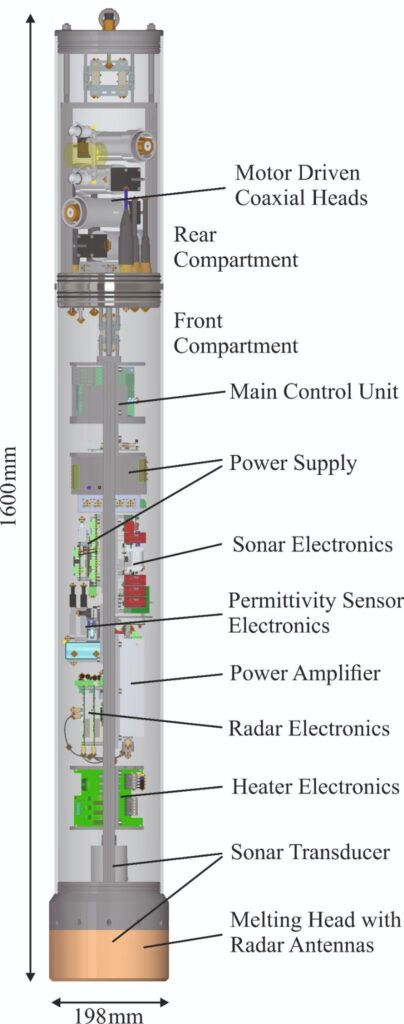
In the initial development phase of TRIPLE, the TRIPLE-IceCraft melting probe served as a technical feasibility prototype. It is a modular melting probe developed in collaboration between the GSI GmbH and the RWTH Aachen University. The design aims for a fully functional and retrievable melting probe that provides standardized cargo area for arbitrary scientific payloads and a drill depth of several hundred meters. It is designed for a maximum speed of up to 5 m/h. One of the key challenges is the full retrievability of the system and therefore the need for a dedicated cable management system. This is constructed as a combination of internal storage and an electric-motor-powered winch for uncoiling and recoiling the cable.
The development of the forefield reconnaissance system for the melting probe is running in parallel within the project TRIPLE-FRS and TRIPLE-FRS-2. A combination of radar and sonar techniques is chosen to benefit from both sensor systems inside ice. To account for the respective propagation speed of electromagnetic waves, an in-situ permittivity sensor will also be included. Additionally, a specialized pulse amplifier has been developed and integrated for the radar system. By integrating the radar antennas together with a acoustic transducer into the melting head, obstacles as well as the ice-water interface can be detected.
Publications
[1] D. Heinen, J. Audehm, F. Becker, G. Boeck, C. Espe, M. Feldmann, G. Francke, P. Friend, N. Haberberger, K. Helbing, C. T. Nghe, M. Stelzig, M. Vossiek, C. Wiebusch & S. Zierke, „The TRIPLE Melting Probe – an Electro-Thermal Drill with a Forefield Reconnaissance System to Access Subglacial Lakes and Oceans“, OCEANS 2021: San Diego – Porto, 2021, pp. 1-7, doi: 10.23919/OCEANS44145.2021.9705999.
[2] J. Kowalski et. al., “Navigation technology for exploration of glacier ice with maneuverable melting probes”, Cold Regions Science and Technology, Volume 123, 2016, Pages 53-70, ISSN 0165-232X, doi: 10.1016/j.coldregions.2015.11.006
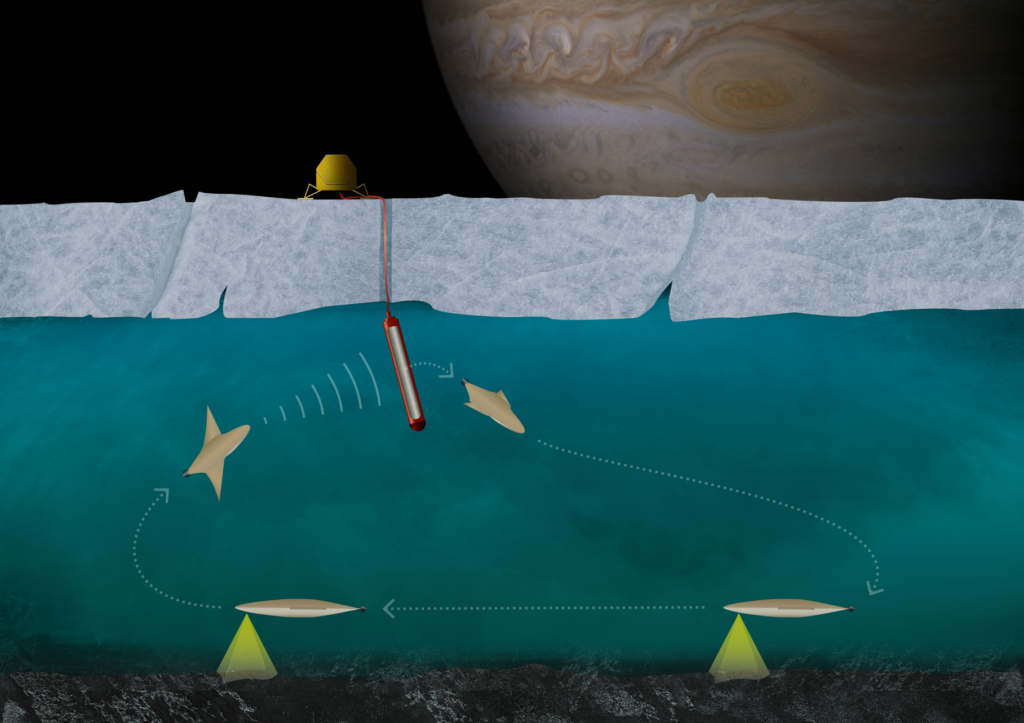
EXPLORE Water
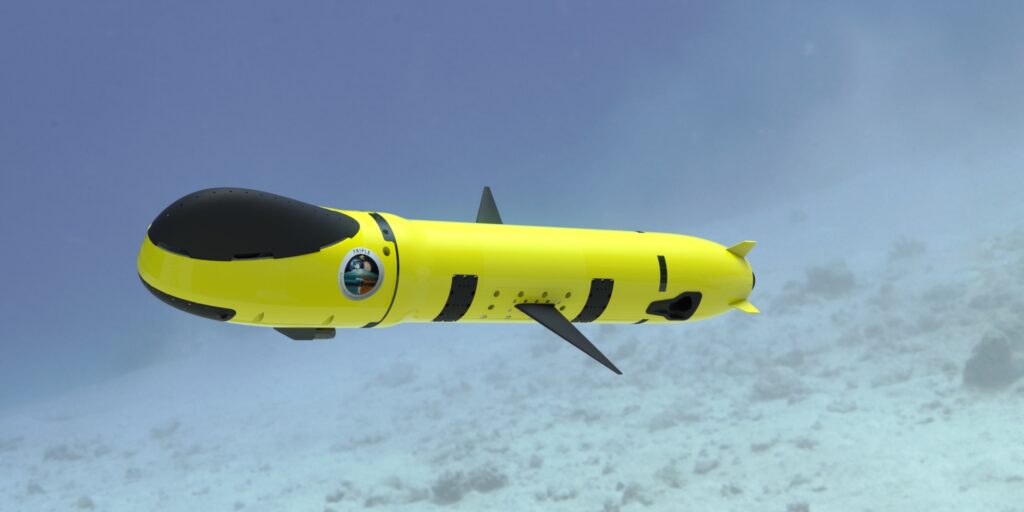
nanoAUV
The Main Challenges for the nanoAUV
With the development of the nanoAUV, the TRIPLE team is breaking new ground in many technical and scientific areas. The biggest challenge in the development is that the nanoAUV should act fully autonomously by the end of the project. Human intervention during an exploration mission is not allowed in order to come as close as possible to a future space mission. This means that the complete mission of the nanoAUV must happen fully automated. This concerns undocking from the melting probe, exploration of the water column, autonomous detection and investigation of point-of-interests as well as return to the melting probe and docking.
Another major challenge is navigation under ice. Surfacing in an emergency is not possible. Nor can satellite signals be used for localization. Therefore, the nanoAUV must navigate entirely on the basis of acoustic signals. Due to reflections and multipath propagation of the acoustic signals between the ground and the ice, this poses a special technical challenge to the sensor technology, which needs to be solved in the project.
The TRIPLE system is being developed with a future space mission in mind. The size and weight of the system are considered from the beginning of the development. The nanoAUV therefore has only limited installation space. This affects the available energy resources and thus the usable actuator technology, sensor technology and computing power. Many existing technical solutions need to be miniaturized specifically for the nanoAUV, such as the Ultra-Short Baseline System.
Exploration of a subglacial lake in the Dome-C-Vostok area presents a special challenge to the durability of the materials used. The nanoAUV must withstand low temperatures and extremely high pressures. Pressure peaks during short-term freezing of the melting probe can lead to pressures of 350 bar and more in the payload section of the melting probe. Out-of-water temperatures can be as low as -65°C or less in Antarctica. Furthermore, the nanoAUV has to deal with unknown water salinity and currents and potentially with hazardous obstacles.
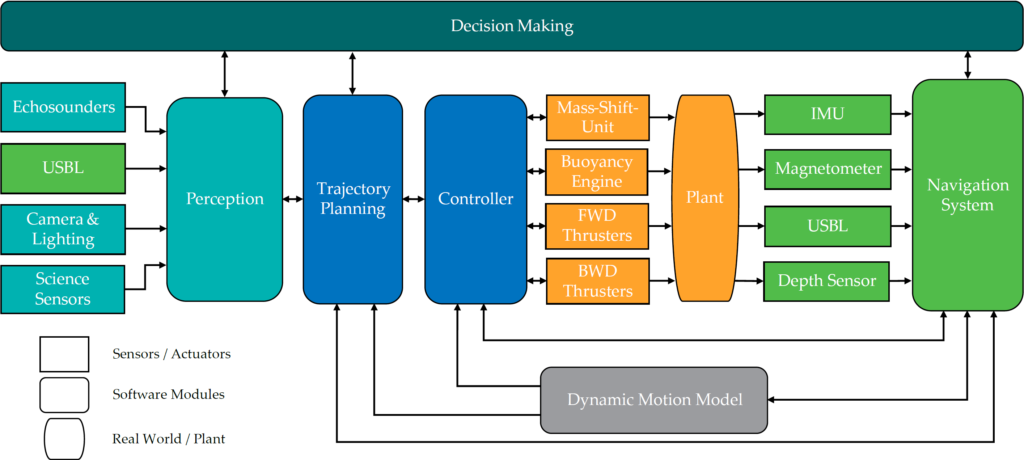
The Guidance, Navigation and Control System (GNC)
To enable fully autonomous operations, the nanoAUV is monitored and controlled by a multitude of sensors, actuators and software modules. This overall system is commonly referred to as Guidance, Navigation and Control System (GNC). The GNC system is composed of modules as shown in the figure below.
ASSESS Habitability
Scientific Payload
The name AstroBioLab (ABL) refers to the idea of an innovative and highly automated sample analysis laboratory for astrobiological investigations. The ABL should not only be able to detect diverse biosignatures in samples taken from the subglacial habitats, but could also provide unequivocal evidence of life.
Our focus in the TRIPLE-project is on a possible ABL use during a field test mission in Antarctica. The ABL offers the opportunity to analyse freshly collected samples directly in the field which avoids transportation damages and potential changes of the samples. Due to the small construction space in the melting probe, the ABL cannot be directly integrated into the melting probe during the field test in Antarctica. Therefore, the ABL remains on the ice surface as part of the ground station.
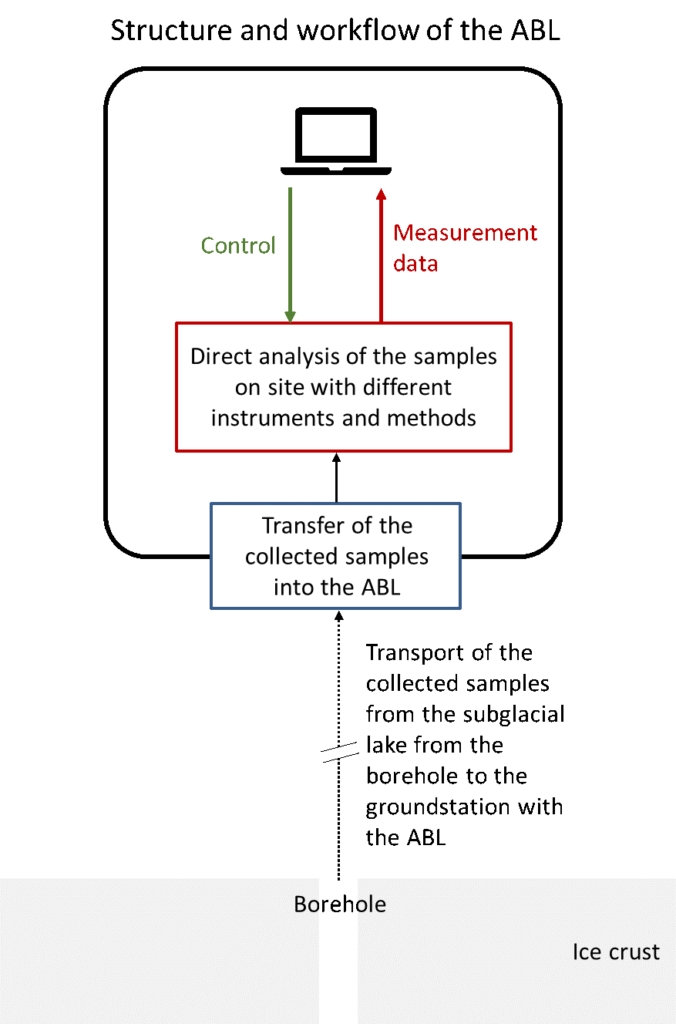
The ABL consists of different individual analytical instruments. For the field test, portable and robust devices using fast analysis methods are particularly suitable, which, as far as possible, should not require time-consuming sample preparation.
Instruments that can be used for sample analysis
- (Fluorescence) microscope (including camera)
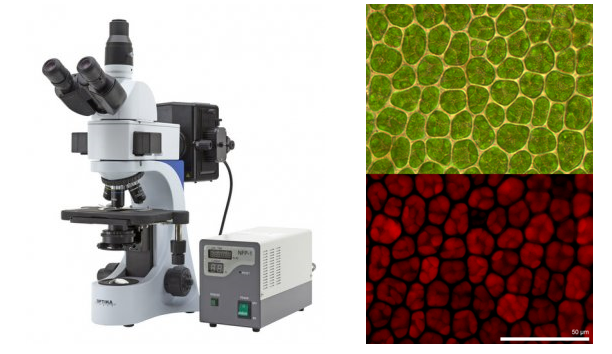
(https://de.wikipedia.org/wiki/Fluoreszenzmikroskopie#/media/Datei:Zz_Plagiomnium_undulatum_fluorescence.jpg)
- Various absorbance-, fluorescence- (UV/Vis/IR) or Raman- spectrometric systems

(https://www.oceaninsight.com/globalassets/catalog-blocks-and-images/catalog-blocks-and-images/spectrometers/qepro.png?width=490)
- Portable mass spectrometer

(https://www.inficon.com/v1/pim-image/618/lgu/33a811dc-ad54-49a2-ab87-fd67d819b5f4.webp)
- Portable DNA/RNA sequencing device (equipped with automated sample preparation module)
