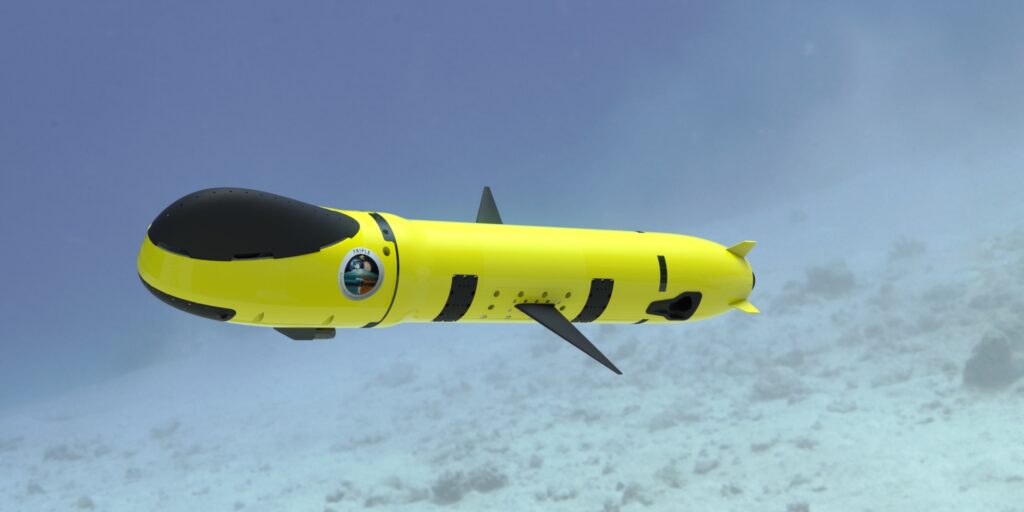
nanoAUV
The Main Challenges for the nanoAUV
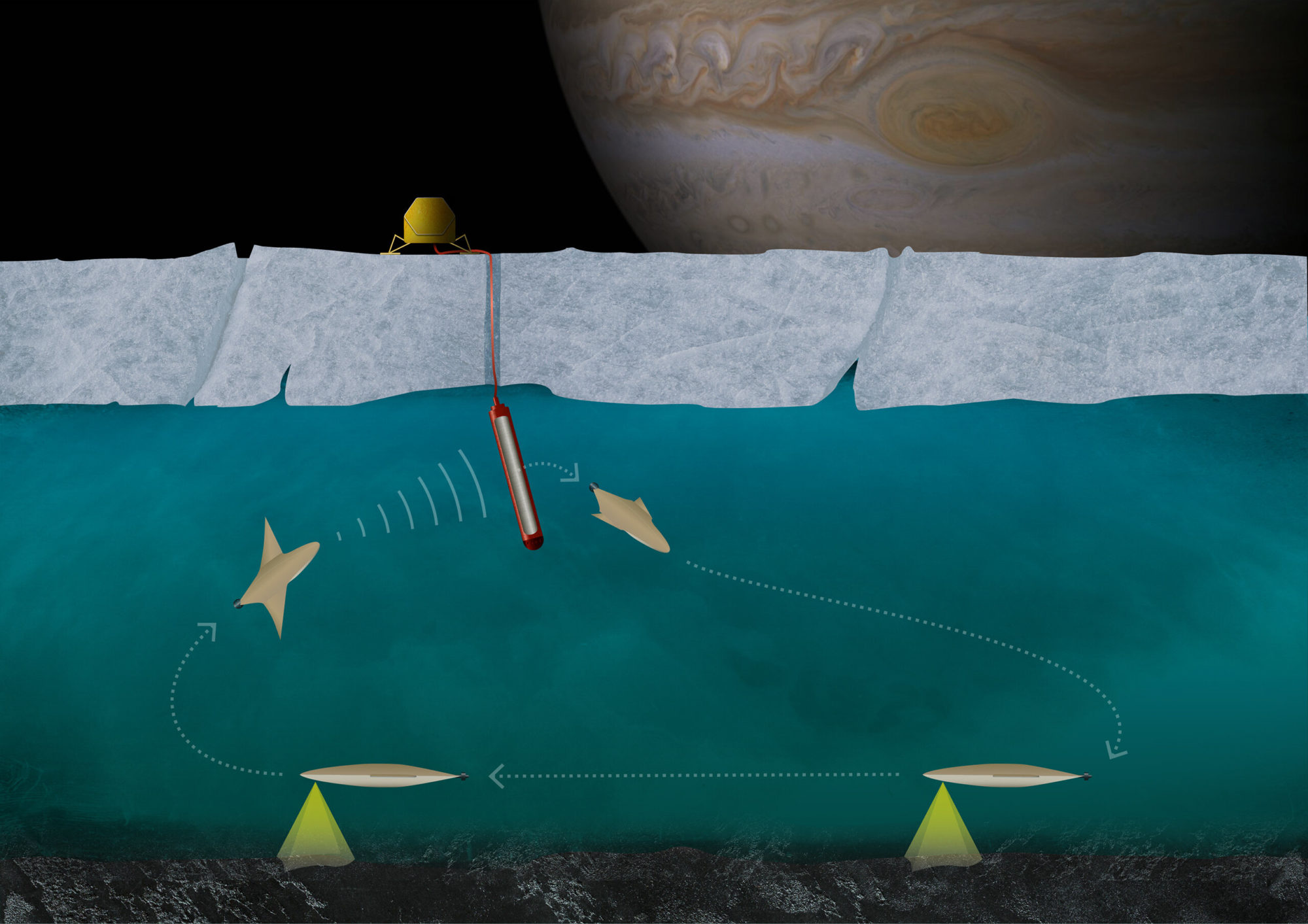
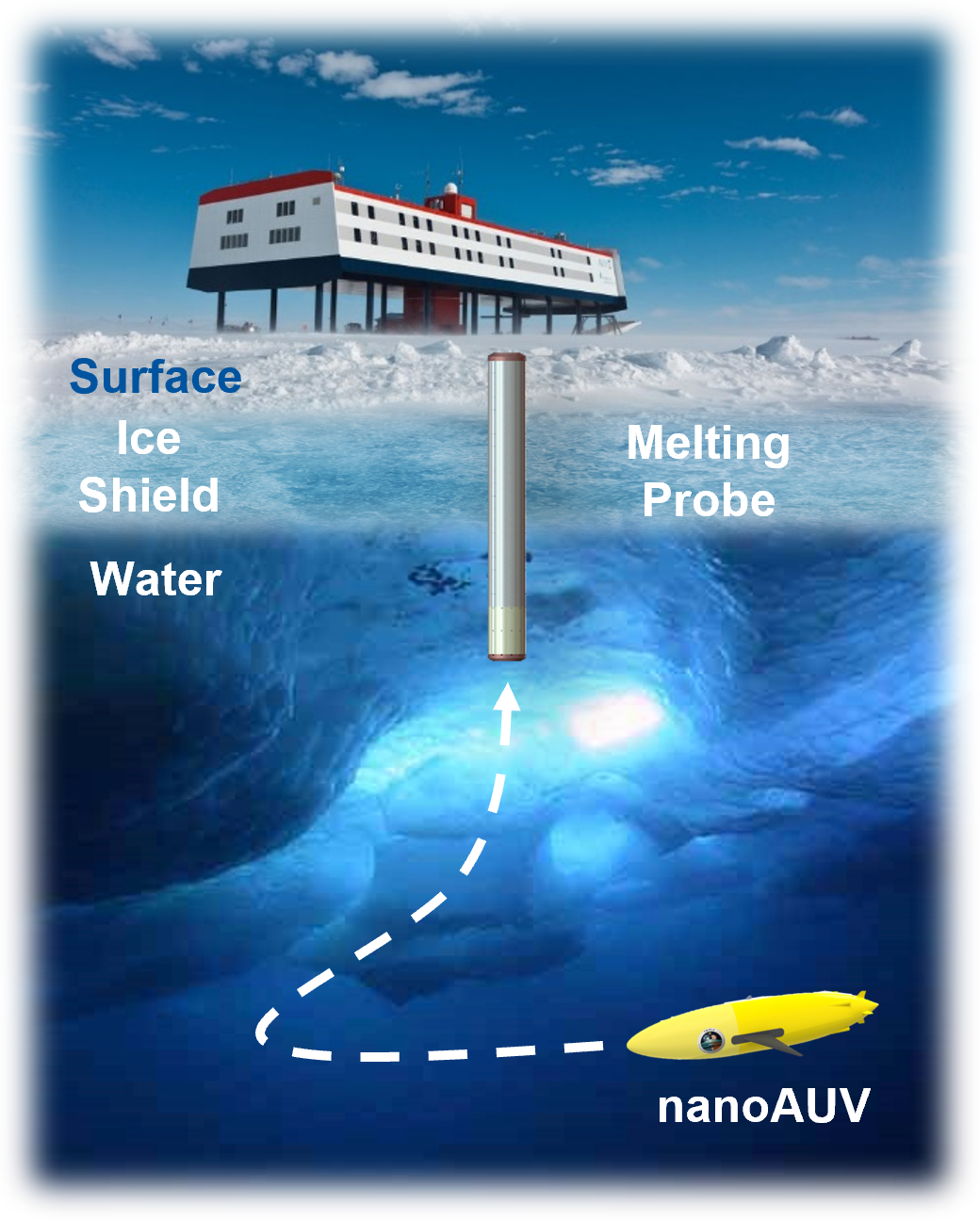
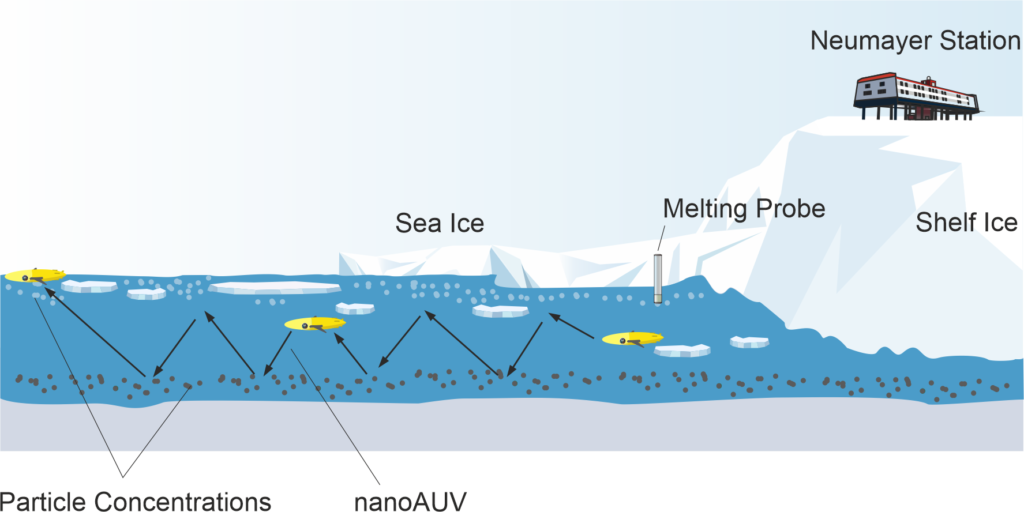
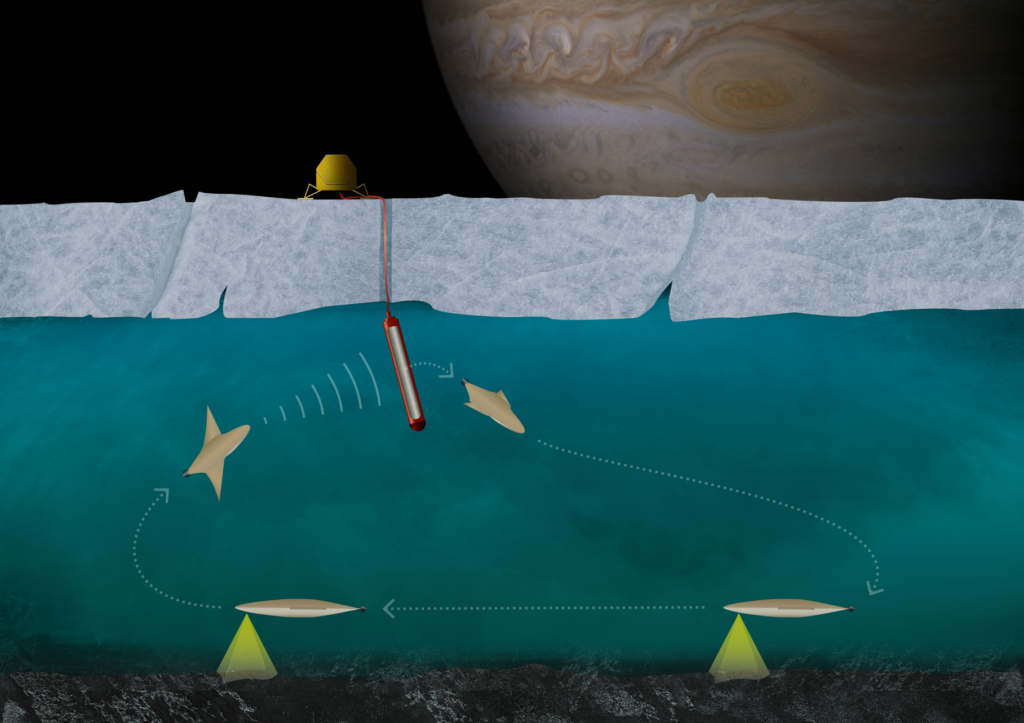
With the development of the nanoAUV, the TRIPLE team is breaking new ground in many technical and scientific areas. The biggest challenge in the development is that the nanoAUV should act fully autonomously by the end of the project. Human intervention during an exploration mission is not allowed in order to come as close as possible to a future space mission. This means that the complete mission of the nanoAUV must happen fully automated. This concerns undocking from the melting probe, exploration of the water column, autonomous detection and investigation of point-of-interests as well as return to the melting probe and docking.
Another major challenge is navigation under ice. Surfacing in an emergency is not possible. Nor can satellite signals be used for localization. Therefore, the nanoAUV must navigate entirely on the basis of acoustic signals. Due to reflections and multipath propagation of the acoustic signals between the ground and the ice, this poses a special technical challenge to the sensor technology, which needs to be solved in the project.
The TRIPLE system is being developed with a future space mission in mind. The size and weight of the system are considered from the beginning of the development. The nanoAUV therefore has only limited installation space. This affects the available energy resources and thus the usable actuator technology, sensor technology and computing power. Many existing technical solutions need to be miniaturized specifically for the nanoAUV, such as the Ultra-Short Baseline System.
Exploration of a subglacial lake in the Dome-C-Vostok area presents a special challenge to the durability of the materials used. The nanoAUV must withstand low temperatures and extremely high pressures. Pressure peaks during short-term freezing of the melting probe can lead to pressures of 350 bar and more in the payload section of the melting probe. Out-of-water temperatures can be as low as -65°C or less in Antarctica. Furthermore, the nanoAUV has to deal with unknown water salinity and currents and potentially with hazardous obstacles.
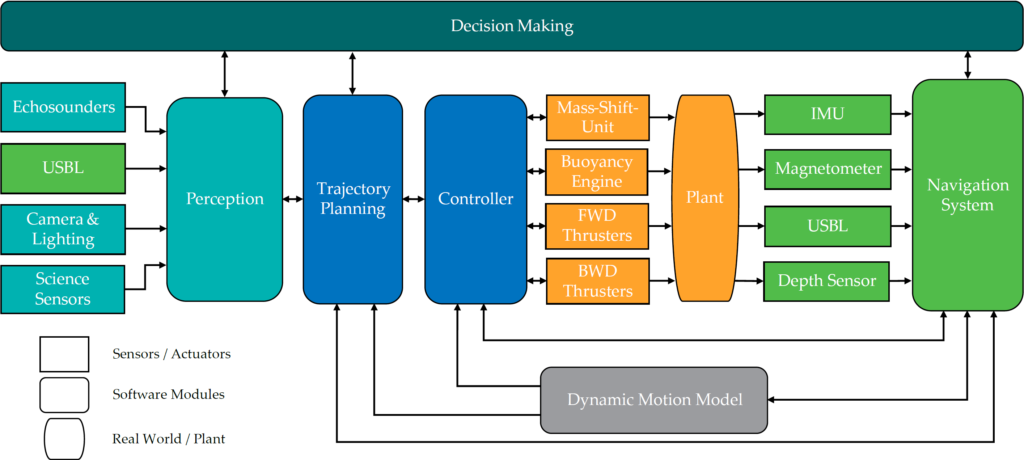
The Guidance, Navigation and Control System (GNC)
To enable fully autonomous operations, the nanoAUV is monitored and controlled by a multitude of sensors, actuators and software modules. This overall system is commonly referred to as Guidance, Navigation and Control System (GNC). The GNC system is composed of modules as shown in the figure below.